Роботов / Сборка Роботов на Микроконтроллерах")
Микроконтроллеры
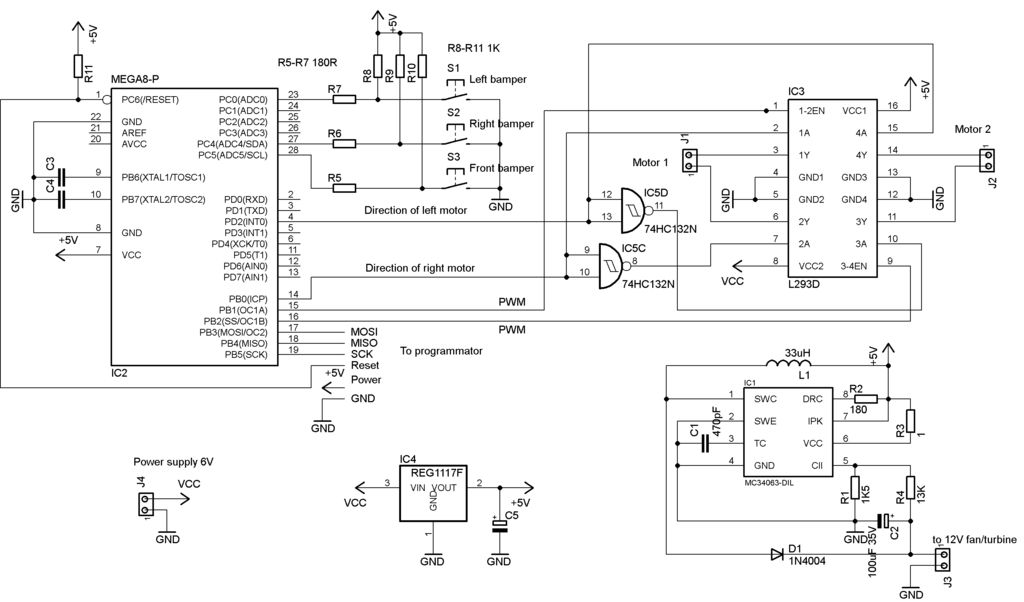
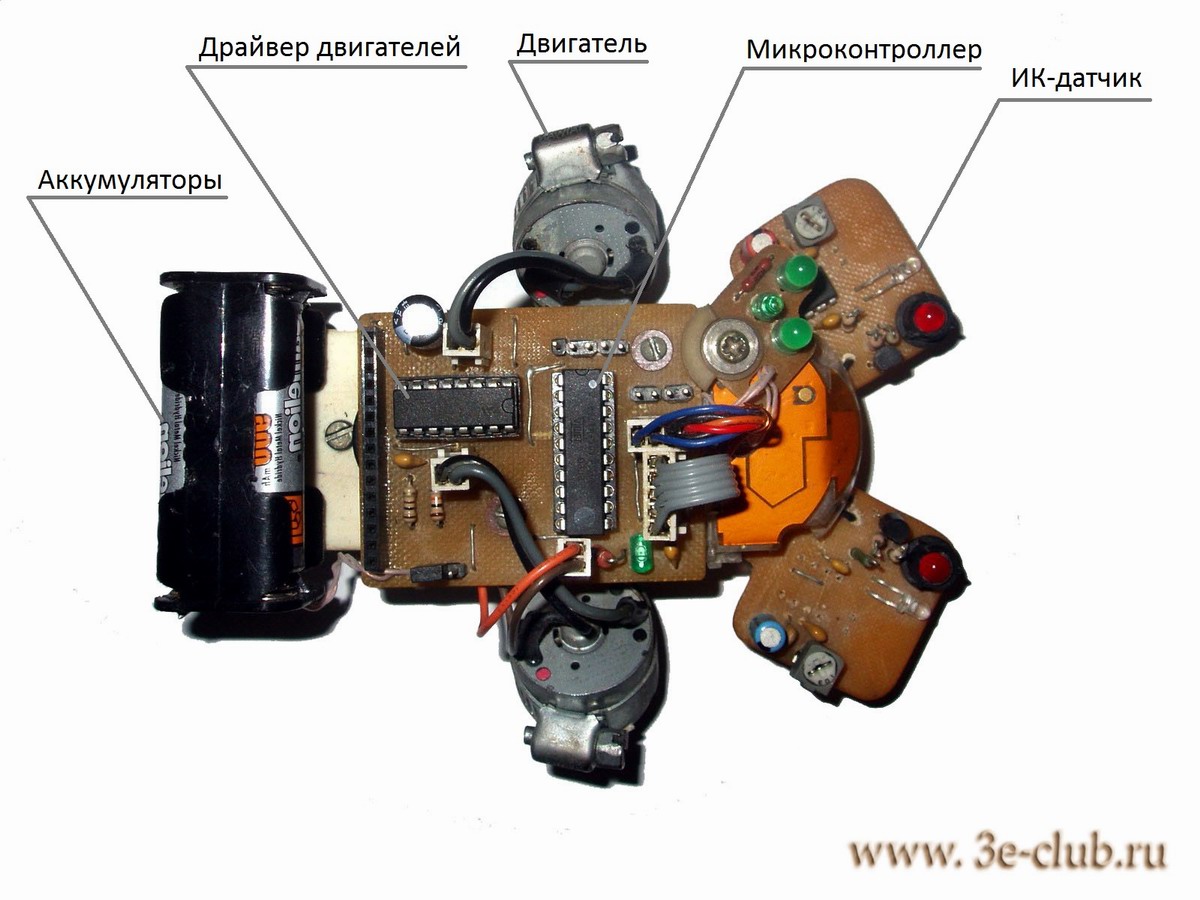
В приведенной схеме рекомендуется использовать электродвигатели с током потребления до мА и напряжением питания В. При использовании более мощных моторов рекомендуется применить раздельное питание электронной схемы и электродвигателей, а также предусмотреть меры по стабилизации работы микроконтроллера. При использовании другого микроконтроллера например, ATtiny26 и др. В этом случае следует использовать подтягивающий резистор при подключении фототранзистора. Если фототранзистор имеет хорошую чувствительность, номинал резистора может лежать в диапазоне 1,5К - 2,7К. Как сделать робота.
: Робот с фотодатчиком")



")




")

 Майк Предко")
Робот Pololu Zumo 32U4 OLED (конструктор без моторов)
Поглазели на программу, теперь пора увидеть схему! Схему в студию!! По сути эта схема достаточно простая, но внешность бывает обманчива Собранный и запрограммированный правильно робот должен при "виде" препядствия отъехать назад и развернуться на месте. Если робот вместо того чтобы отъезжать от препятствие таранит его то скорее всего проблемма в фотоэлементе или в светодиоде помните свет от светодиода должен отразиться от препятствия и попасть на фотоэлемент который в свою очередь должен на него отреагировать. Добавлять комментарии могут только зарегистрированные пользователи.











В этой статье представлена схема простого "робота". Он ездит на свет, а если нет источника света, тогда включается режим "Свободный поиск" то есть робот будет ездить, а при столкновении отъезжать и разворачиваться. В качестве датчика было решено взять фоторезисторы СФ Робот состоит из двух моторов. Вот как они будут работать при определенных действиях:. Средний балл статьи: 0 Проголосовало: 0 чел.